
Microrrobôs
controlados individualmente com campos de força
Redação
do Site Inovação Tecnológica - 28/01/2016

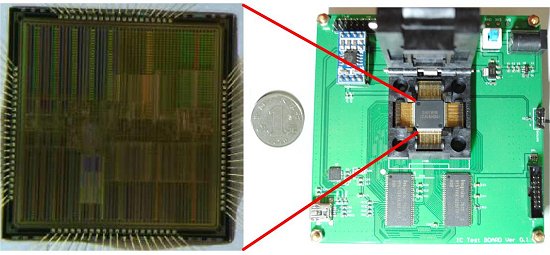
Os microrobôs são controlados de forma independente
mesmo atuando em grupo, um avanço cujo objetivo a longo prazo é criar máquinas
de fabricação avançada e pesquisas biomédicas. [Imagem: Purdue
University/David Cappelleri]
Controle independente
Uma tecnologia de
"mini-campos de força" foi usada para alimentar e controlar
microrrobôs individuais de forma independente.
O mais comum nesse campo tem sido
construir enxames robóticos, usando microrrobôs que agem socialmente,
imitando o comportamento de insetos, como abelhas e formigas.
Mas Sagar Chowdhury, da
Universidade Purdue, nos EUA, queria controlar os robôs de forma individual,
com vistas a utilizá-los em futuros processos de fabricação, criando máquinas
minúsculas capazes de agir de forma ordenada e programada.
"A razão pela qual nós
queremos movimentos independentes de cada robô é para que eles possam fazer
tarefas cooperativas de manipulação. Nós queremos ser capazes de controlá-los
individualmente para que possamos ter alguns robôs aqui fazendo uma coisa, e
alguns robôs lá fazendo outra coisa ao mesmo tempo," explicou seu
professor David Cappelleri, que coordenou o trabalho.
Robôs magnéticos
A grande novidade, portanto, está
no sistema construído para controlar os robôs.
Chowdhury usou uma matriz de
minúsculas bobinas planas que geram campos para criar uma espécie de tabuleiro
de damas magnético, onde cada quadrado representa uma posição possível de cada
microrrobô.
Os microrrobôs contêm discos
magnéticos e uma superfície inferior que os permite deslizar pelo tabuleiro. No
protótipo, cada robô tem cerca de 2 milímetros de diâmetro, mas a equipe
pretende trabalhar com microrrobôs em torno de 250 micrômetros de diâmetro,
aproximadamente o tamanho de um ácaro.
Os robôs são movidos utilizando
as forças magnéticas atrativas ou repulsivas dos campos magnéticos gerados
pelas bobinas. O software que controla as bobinas permite então traçar roteiros
específicos para cada robô de forma independente e com movimentos simultâneos.
Campos de força
Os "campos de força"
também são usados para alimentar os robôs.
"Os robôs são pequenos
demais para que colocássemos pilhas neles, então eles não podem ter energia a
bordo. Você precisa usar uma forma externa para alimentá-los. É como usar
mini-campos de força," disse Cappelleri.
Agora que os microrrobôs já
conseguem se mover de forma independente, o próximo passo será dar-lhes a
capacidade para fazer algo útil - apertar parafusos ou capturar micropartículas
seriam ótimos para começo de conversa para quem pretende criar "futuros
esquemas de manufatura avançada".
Bibliografia:
Towards Independent Control of Multiple Magnetic Mobile Microrobots
Sagar Chowdhury, Wuming Jing, David Cappelleri
Micromachines
Vol.: 7 (1): 3
DOI: 10.3390/mi7010003
Towards Independent Control of Multiple Magnetic Mobile Microrobots
Sagar Chowdhury, Wuming Jing, David Cappelleri
Micromachines
Vol.: 7 (1): 3
DOI: 10.3390/mi7010003




















{kind=link}
0 Comentários